Spyder Monkey
New member
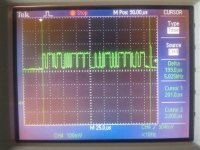
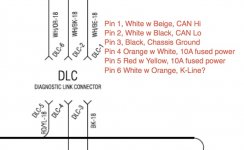
I finally got the parts to start reverse engineering the BUDS protocol and I can't seem to find the pin assignments for the 6 pin Buds connector and the service PDF is going slower than christmas for some reason. Does anybody know / have the pinout for that 6 pin connector? I think CAN Hi is White / beige and CAN Lo is White / black but I am not sure. Any help appreciated.
David
David

")

 opcorn:
opcorn: